Conceptual Design Approach
In order to consider a wide range of possible solutions to the challenge posed, we began our design process with a series of brainstorming session on various elements of the design.
Strategic Concepts
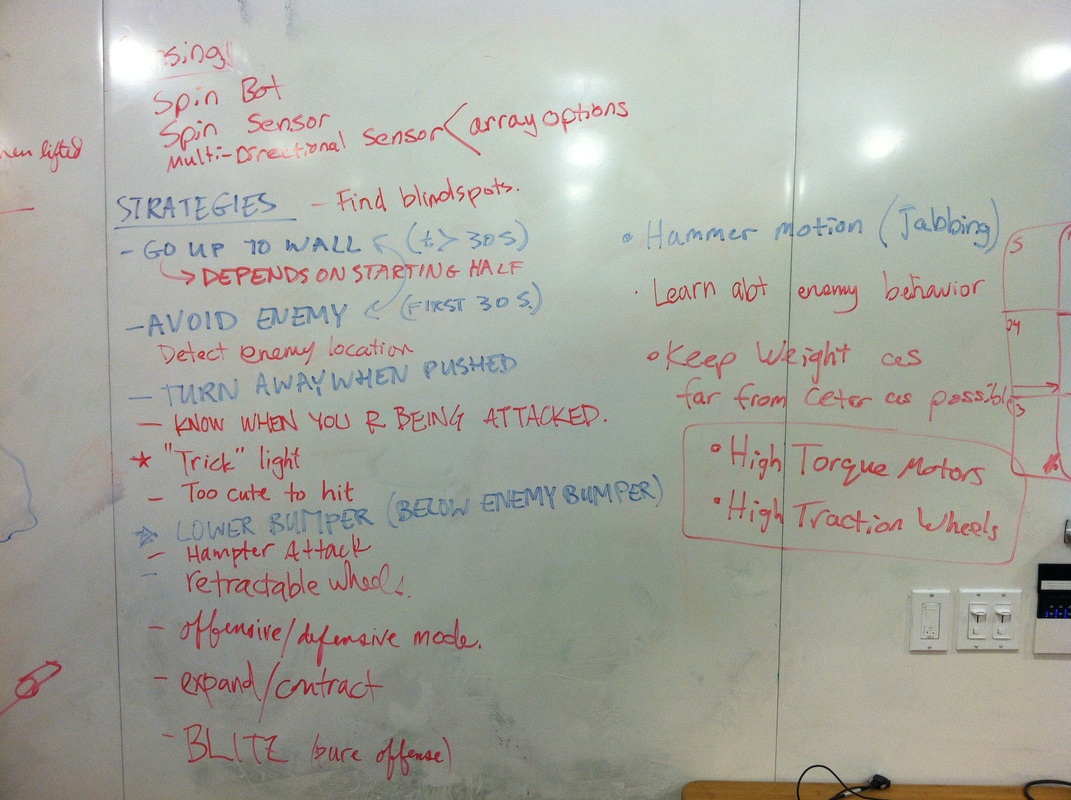
We generated several high level strategies that a Sumo Bot might employ to dominate the final tournament.
We looked into offensive strategies such as high speed, high torque, hammer attacks, and many others.
We also looked at defensive strategies such as avoiding the enemy, "hugging" the wall, using retractable wheels which would allow us to stick to the table when pushed, as well as others.
In the end, we decided unanimously to pursue an aggressive 90% attack and 10% defensive strategic approach. This decision helped us to narrow our focus as we began to brainstorm specific elements of the bot.
We looked into offensive strategies such as high speed, high torque, hammer attacks, and many others.
We also looked at defensive strategies such as avoiding the enemy, "hugging" the wall, using retractable wheels which would allow us to stick to the table when pushed, as well as others.
In the end, we decided unanimously to pursue an aggressive 90% attack and 10% defensive strategic approach. This decision helped us to narrow our focus as we began to brainstorm specific elements of the bot.
Configuration Brainstorming
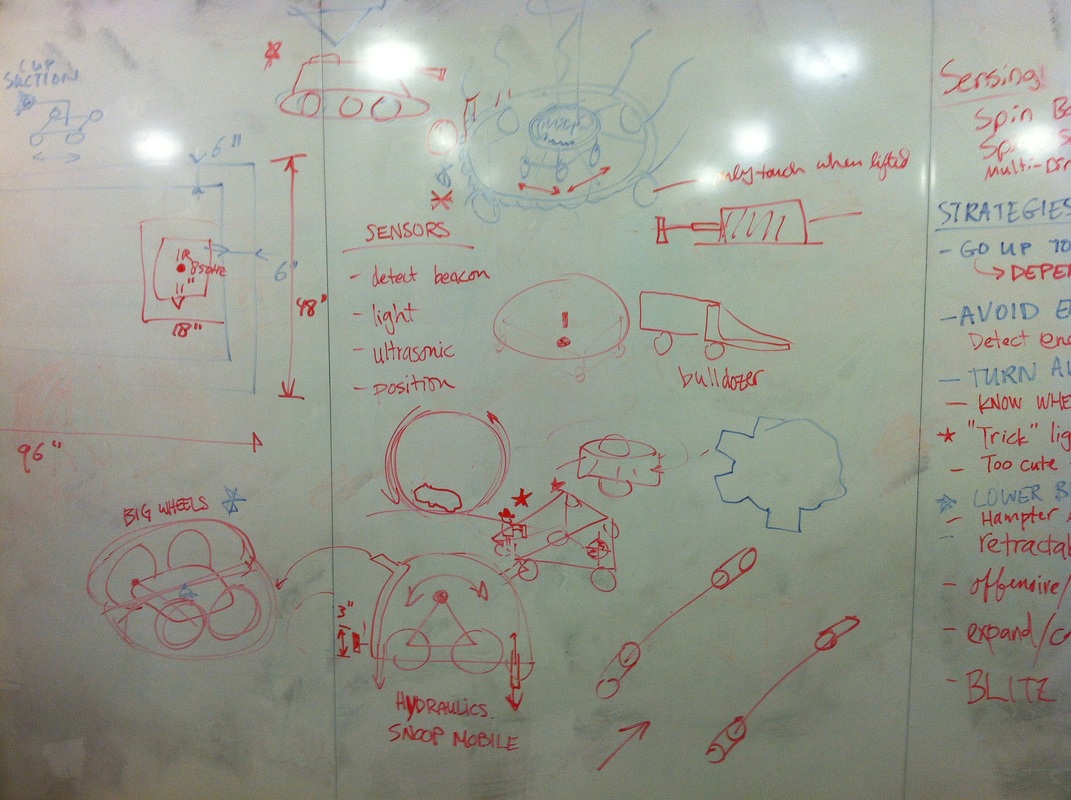
With our basic strategic approach established, we next dove into brainstorming potential vehicle configurations and features.
We looked at drive systems, bumper configurations, sensors we might employ, and many other features as can be seen in the image to the left.
This process helped us to flesh out some of our strategy concepts, and to identify trade-offs between concepts.
We looked at drive systems, bumper configurations, sensors we might employ, and many other features as can be seen in the image to the left.
This process helped us to flesh out some of our strategy concepts, and to identify trade-offs between concepts.
Morphopological Brainstorm - Design Elements and Features
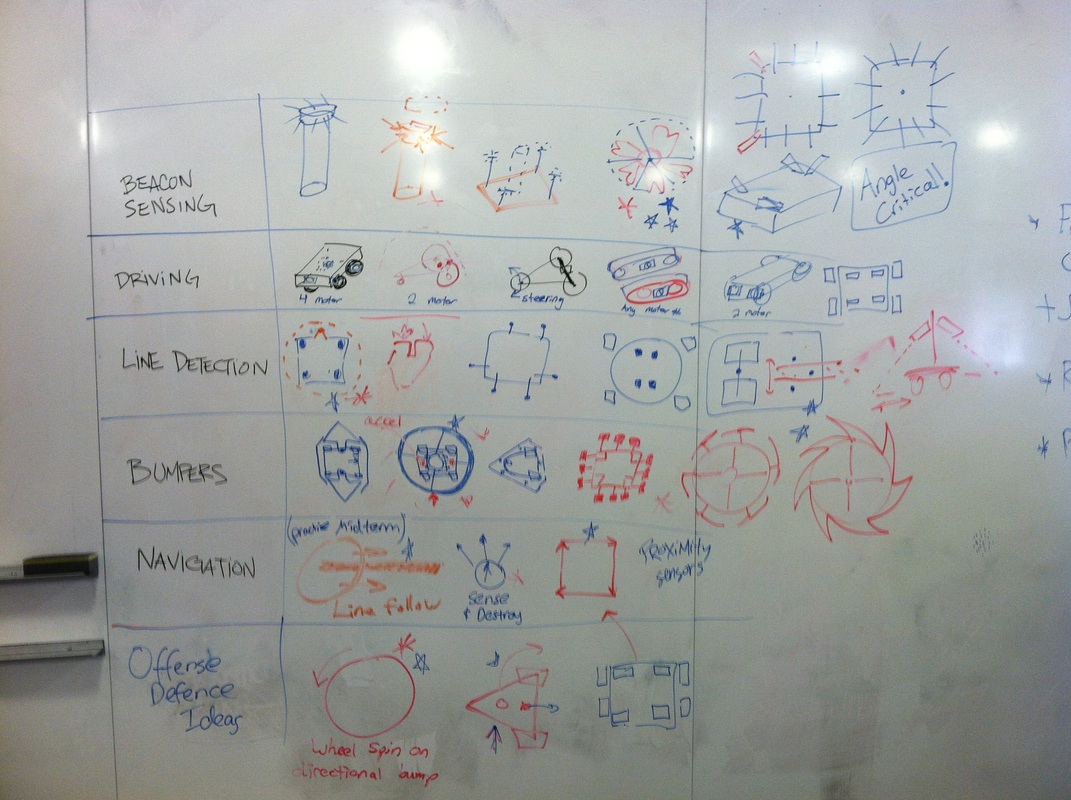
Finally, we organized our idea generation into a morphopological chart.
We identified 6 basic areas of the potential design; Beacon Sensing, Driving, Line Detection, Bumpers, Navigation, and finally specialized offensive/defensive strategies.
This was a useful tool for our team to visualize all the ideas together - and ultimately enabled our downselect to the final vehicle configurations we considered.
Final Configuration Candidates
Based on discussion we arrived at 3 primary concepts that incorporated complementary concepts from the morphopological chart.
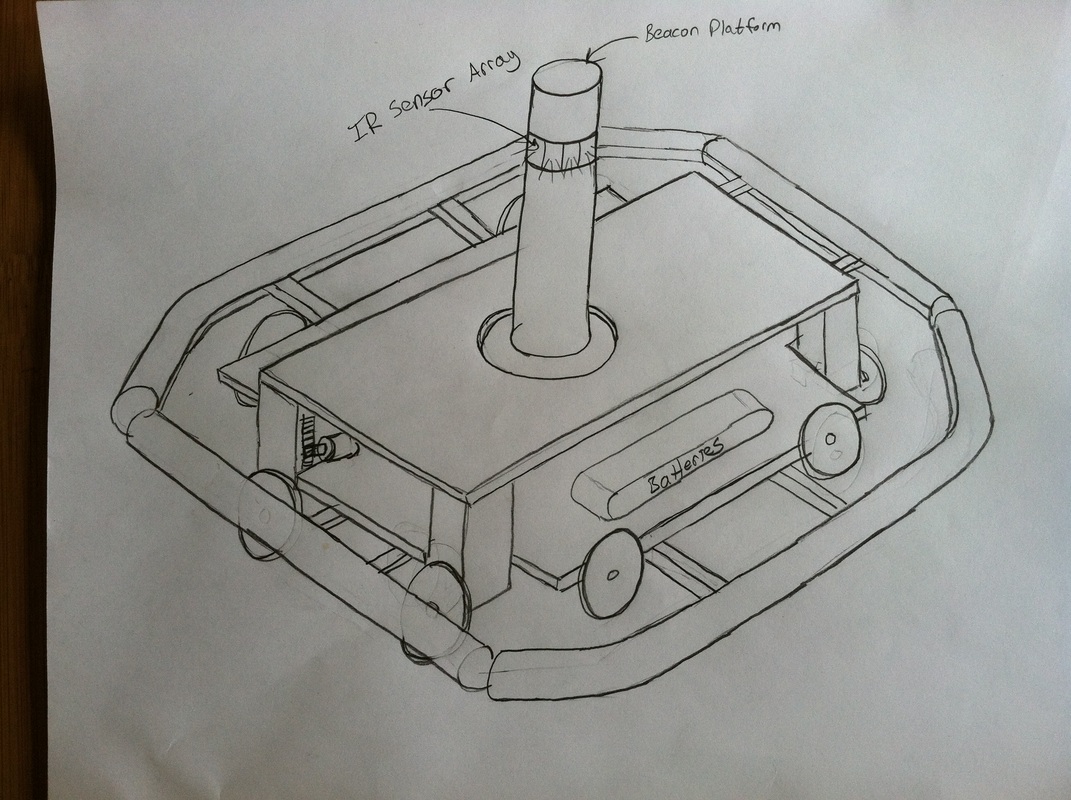
The first design concept is shown at left. This design explored a secondary drive system that was oriented 90 degrees to the primary drive system. This could be used as a defensive or offensive measure.
In design two below, we looked into the idea of a spinning bumper. This feature would theoretically allow us to spin way from an opponent, or spin an opponent off the table.
Concept three, also shown below, was the simplest of the ideas, and in the end the concept we chose to pursue. Despite it's simplicity, we felt this concept offered equally attractive defensive benefits thanks to its CG being significantly offset from its Centroid, but its simplified design offered substantial benefits over the more complicated designs.
The first design concept is shown at left. This design explored a secondary drive system that was oriented 90 degrees to the primary drive system. This could be used as a defensive or offensive measure.
In design two below, we looked into the idea of a spinning bumper. This feature would theoretically allow us to spin way from an opponent, or spin an opponent off the table.
Concept three, also shown below, was the simplest of the ideas, and in the end the concept we chose to pursue. Despite it's simplicity, we felt this concept offered equally attractive defensive benefits thanks to its CG being significantly offset from its Centroid, but its simplified design offered substantial benefits over the more complicated designs.
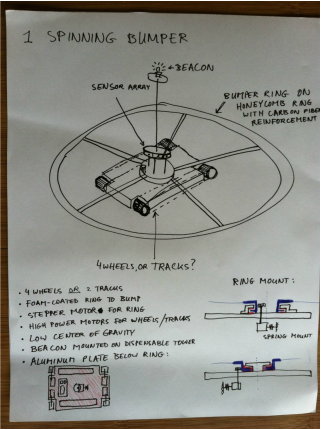
Design concept 2 used a small inner frame, and a wider external bumber that was actuated to spin. The spinning bumper was something we thought could be used effectively for both offensive and defensive strategies.
|
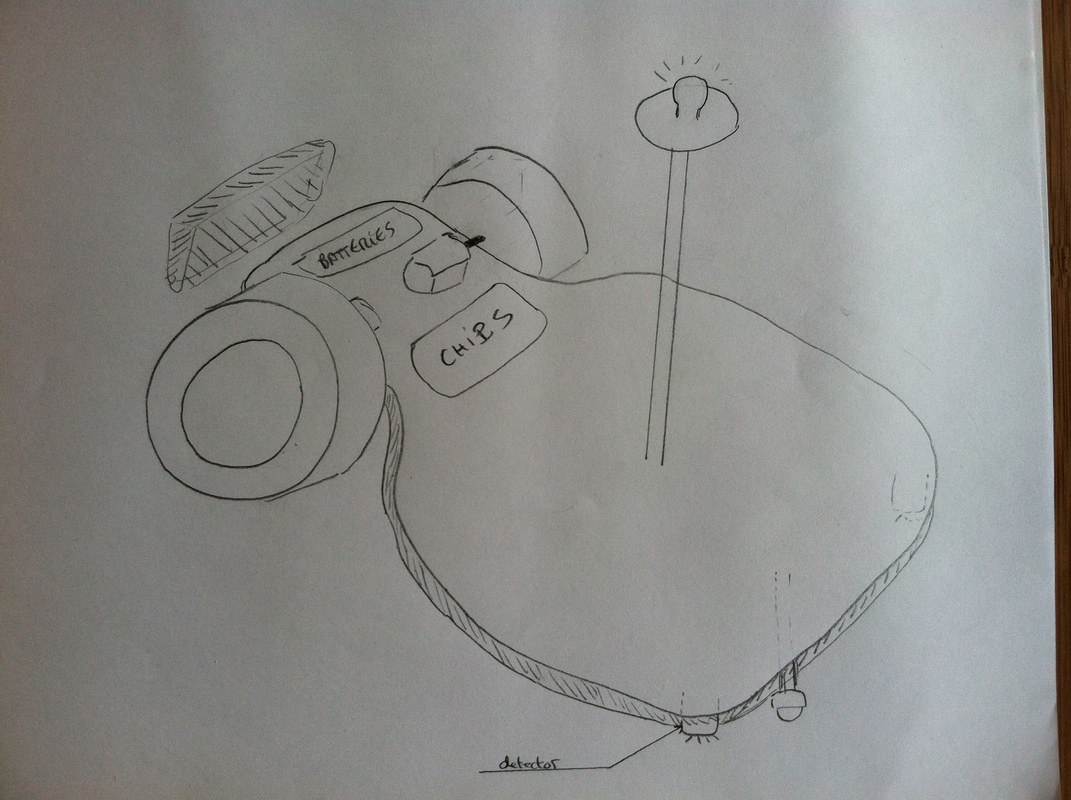
Design 3 used a simple platform with 2 wheels and caster. The weight of the vehicle is biased to the side with the wheels to make it easily pivot away from contact on the back or sides.
|
